Motorized Stage with Integrated
Controller - Homing Repeatability (106-01 with 1 mm Lead Screws)
 Homing
repeatability tests were performed on Olympus BX51 microscope using a custom
calibration slide with patterns created by metal vapor-deposition. Objective - UPlanFL 10X/0.30, camera - Canon 40D mounted in primary image plane (no relay
lens). The camera was connected to computer with USB cable and controlled by
Canon Utility program. During acquisition the camera was set in Live View mode. Pixel size with this setup was 0.575
μm. Homing target was a cross as
shown in the picture. Tests were performed with 36V power supply. Stage movement and overall
control was done by the following script written in the
ScopeTool interpreted language:
Homing
repeatability tests were performed on Olympus BX51 microscope using a custom
calibration slide with patterns created by metal vapor-deposition. Objective - UPlanFL 10X/0.30, camera - Canon 40D mounted in primary image plane (no relay
lens). The camera was connected to computer with USB cable and controlled by
Canon Utility program. During acquisition the camera was set in Live View mode. Pixel size with this setup was 0.575
μm. Homing target was a cross as
shown in the picture. Tests were performed with 36V power supply. Stage movement and overall
control was done by the following script written in the
ScopeTool interpreted language:
Repeat 100 Times
XY Home ; XY Wait ;
XY 11301 13733 ; XY Wait ; ! Position
of the cross ;
Snap ; Delay 4000 ;
! Image of the cross ;
Endrepeat
The test consisted of
homing and moving to the target position, repeated 100 times. (Distance numbers in the
script are in microns and time is in milliseconds). The measured errors in this
test
include errors of both homing and relocation to the target. Homing errors alone
should be smaller than in the results below.
Homing routine consists of four phases: high speed homing, moving back by a
small amount, low speed homing, and moving out by the size of the sensor
aperture to ensure it is not blocked by the flag.
Camera control in the script (the Snap command) was achieved by sending key
strokes to the Canon Utility program, that correspond to the shutter release and
waiting for the image transfer to complete.
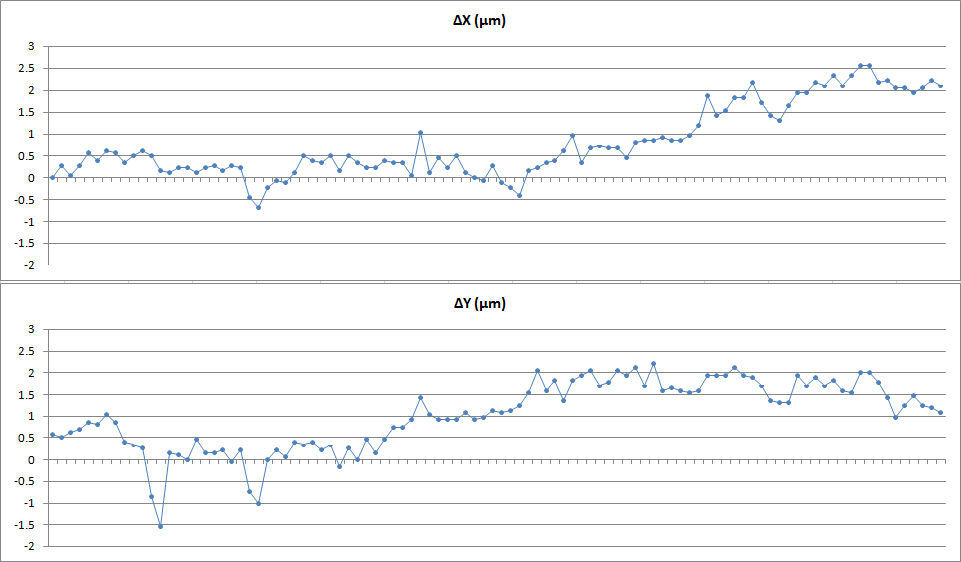
Assessment of relocation was done with a purpose-written software that
calculated shifts between images with sub-pixel accuracy (0.1 of pixel
size). Homing errors from individual repetitions of the test recalculated in
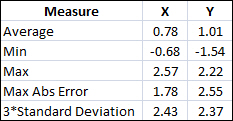
microns are given by the following plots. Homing repeatability has two numerical
measures: maximal deviation from the average and standard deviation multiplied
by 3.
Summary Results
Home > Motorized Stage with Integrated Controller
> Homing Repeatability